
Está realizado sobre una estructura de Meccano y posee tres patas controladas por sendos servomotores, una cabeza que contiene otro servomotor, dos indicadores led que simulan ojos, un sistema de alimentación mediante 4 pilas AA con su portapilas plano, interruptor de alimentación con indicador led, receptor de infrarrojos, conector de programación y todo ello controlado por un Picaxe 18X.

Como se puede apreciar en la foto el diseño del robot es de lo más simple, así como su tarjeta de control que es de desarrollo propio. En la placa quedan dos salidas libre para poder conectar dos servomotores más si es necesario.
El esquema de la placa es el siguiente:
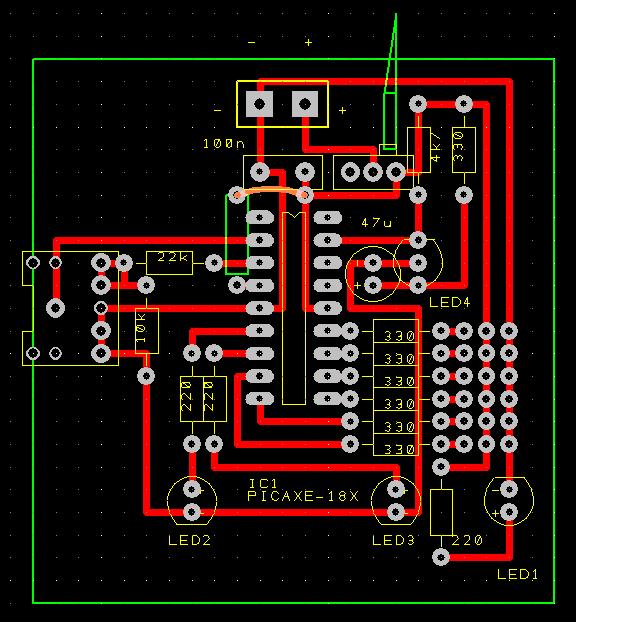
El servomotor de la cabeza está conectado en la salida 7 y los otros tres de las patas en la 6-5-4. Los leds de los ojos están conectados a las salida 0 y 1. Y el receptor de infrarrojos (LED4 en la placa) está conectado en la entrada 0 (entrada Infrain).
No hay comentarios:
Publicar un comentario